ROS1基础与常用命令
1. 前言
接触ROS差不多有一年多了,最近由于科研的需要,又重新捡了起来。个人觉得快速上手ROS的方法是在理解大概原理的前提下,快速把常用的操作过一遍。在使用ROS的时候,有时一些命令常常想不起来,上网查阅又需要花费大量时间,这里一并总结了一下。
2. ROS的安装
一般的使用场景都是在Ubuntu 20.04 上安装Noetic版本,一般在有代理的情况下,按照官方的教程,可以一次性安装成功,步骤如下:
设置源列表使计算机接受来自packages.ros.org的软件
1
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
设置Key
1
sudo apt install curl # 安装curl,若已安装则跳过
1
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
安装
1
2sudo apt update #更新软件包索引
sudo apt install ros-noetic-desktop-full #安装完整版设置环境变量
1
2echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
source ~/.bashrc安装常用的构建依赖项
1
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
安装和初始化rosdep
1
2
3sudo apt install python3-rosdep
sudo rosdep init
rosdep update
安装完成后,后续如果要安装其他软件包,可以在ROS Packages中寻找,或者使用命令:
1 | apt search ros-noetic |
若想安装特定的软件包,可以使用命令:
1 | sudo apt install ros-noetic-PACKAGE |
3. ROS简介
ROS(Robot Operating System)是一个用于机器人开发的开源框架,旨在简化机器人软件的开发。它提供了一系列工具、库和约定,以便于开发者创建复杂的机器人应用。
节点(Node)
节点是ROS系统中的基本计算单元。每个节点都是一个独立的进程,可以执行特定的任务。不同的节点可以用不同的语言编写。
话题(Topic)
话题是ROS中节点之间通信的方式。节点可以发布(publish)和订阅(subscribe)话题。发布者将消息发送到特定的话题,而订阅者接收该话题的消息。这样,节点之间的耦合度降低,增加了系统的灵活性。
服务(Service)
服务是ROS中另一种通信机制,允许节点通过请求-响应模式进行交互。一个节点提供服务,另一个节点调用该服务。
消息(Message)
消息是ROS中传递的数据结构。每种类型的消息都有其特定的格式,定义了节点之间交换的数据。ROS内置了多种基本消息类型,也支持用户自定义消息类型。
参数服务器(Parameter Server)
参数服务器是一个共享的全局数据库,用于存储配置参数。节点可以读取和写入这些参数,以便动态调整系统的行为。
工作空间(Workspace)
工作空间是ROS开发环境的一个目录,包含了ROS包、库和配置文件。我们可以在工作空间中编写、测试和管理机器人应用。
包(Package)
ROS的功能以包的形式组织。每个包可以包含节点、库、配置文件、文档等。包的结构使得代码的复用和共享变得更加方便。
4. 构建工作区
我们这里以在home目录中创建一个名为catkin_ws的工作区为例
1 | mkdir -p catkin_ws/src |
这里有一个坑:如果之前在Ubuntu中安装了Anaconda或者miniconda,会出现找不到
empy包的错误。解决方案:
设置启动终端时不自动进入base环境,命令:
重新打开终端,重新编译:
2
catkin_make
在每次运行软件包时,我们通常要先设置环境变量,为了避免频繁操作,可以将其写入.bashrc文件中,这样每次启动终端时会自动设置。
使用命令
1 | echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc |
检查环境变量:
1 | echo $ROS_PACKAGE_PATH |
5. 基础操作例程
5.1 小海龟
小海龟例程是ROS非常经典的入门学习包,可以让我们快速熟悉ROS命令行工具的使用
启动ROS Master
1
roscore
启动小海龟仿真器节点
1
rosrun turtlesim turtlesim_node
启动海龟控制节点
1
rosrun turtlesim turtle_teleop_key
启动上述两个节点之后,我们便可以用键盘来控制海龟的移动。
查看系统计算图
1
rqt_graph
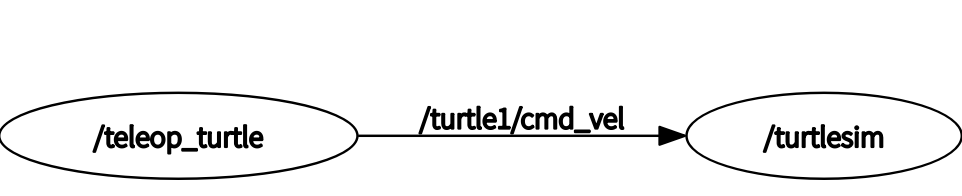
从图中可知,目前ROS系统中存在两个节点,一个是海龟仿真器节点
turtlesim,其订阅了话题/turtle1/cmd_vel,还有一个节点是teleop_turtle,其往/turtle1/cmd_vel中发布信息,这样两个节点间便完成了通讯。节点相关信息的命令为
rosnode,示例:查看节点列表
1
rosnode list
输出:
1
2
3
4/rosout
/rqt_gui_py_node_83022
/teleop_turtle
/turtlesim查看某个节点的信息
1
rosnode info /turtlesim
输出:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32Node [/turtlesim]
Publications:
* /rosout [rosgraph_msgs/Log]
* /turtle1/color_sensor [turtlesim/Color]
* /turtle1/pose [turtlesim/Pose]
Subscriptions:
* /turtle1/cmd_vel [geometry_msgs/Twist]
Services:
* /clear
* /kill
* /reset
* /spawn
* /turtle1/set_pen
* /turtle1/teleport_absolute
* /turtle1/teleport_relative
* /turtlesim/get_loggers
* /turtlesim/set_logger_level
contacting node http://ubuntu:37017/ ...
Pid: 82069
Connections:
* topic: /rosout
* to: /rosout
* direction: outbound (52857 - 127.0.0.1:47492) [26]
* transport: TCPROS
* topic: /turtle1/cmd_vel
* to: /teleop_turtle (http://ubuntu:41229/)
* direction: inbound (45856 - ubuntu:38849) [32]
* transport: TCPROS
话题相关命令为
rostopic,示例:查看话题列表:
1
rostopic list
输出:
1
2
3
4
5
6/rosout
/rosout_agg
/statistics
/turtle1/cmd_vel
/turtle1/color_sensor
/turtle1/pose发布话题:
1
2
3
4
5
6
7
8rostopic pub /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 1.0
y: 1.0
z: 0.0
angular:
x: 1.0
y: 0.0
z: 0.0"
消息相关命令为
rosmsg,示例:查看消息类型
1
rosmsg show geometry_msgs/Twist
输出:
1
2
3
4
5
6
7
8geometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
服务相关命令为
rosservice,示例:查看提供服务的内容
1
rosservice list
输出:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15/clear
/kill
/reset
/rosout/get_loggers
/rosout/set_logger_level
/rqt_gui_py_node_84673/get_loggers
/rqt_gui_py_node_84673/set_logger_level
/spawn
/teleop_turtle/get_loggers
/teleop_turtle/set_logger_level
/turtle1/set_pen
/turtle1/teleport_absolute
/turtle1/teleport_relative
/turtlesim/get_loggers
/turtlesim/set_logger_level请求产生一个海龟的服务
1
2
3
4rosservice call /spawn "x: 0.0
y: 0.0
theta: 0.0
name: 'turtle2'"执行完后会在
turtlesim中产生一个海龟
话题记录和复现工具
话题记录
1
rosbag record -a -O cmd_record
话题复现
1
rosbag play cmd_record.bag
5.2 发布和订阅
发布和订阅是ROS最基础的通信机制,这里演示如何创建功能包,编写一个信息发布节点 Publisher,和一个信息订阅节点 Pubscriber。
5.2.1 功能包的构建和编译
创建功能包
1
catkin_create_pkg <package_name> [depend1] [depend2] [depend3]
示例:
执行命令创建功能包
1
2cd ~/catkin_ws/src/
catkin_create_pkg pub_sub_pkg std_msgs rospy roscpp编译功能包
1
2
3cd ~/catkin_ws/
catkin_make
source /devel/setup.bash
5.2.2 Publisher的编写
5.2.2.1 cpp版本的实现
在
pub_sub_pkg/src/路径下新建文件random_number_publisher.cpp,添加如下内容1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
int main(int argc, char** argv) {
ros::init(argc, argv, "random_number_publisher");
ros::NodeHandle nh;
// 创建一个发布者,发布到 "random_number" 主题
ros::Publisher random_pub = nh.advertise<std_msgs::Int32>("random_number", 10);
// 初始化随机数生成器
std::srand(static_cast<unsigned int>(std::time(0)));
// 设置循环频率
ros::Rate loop_rate(1); // 每秒发布一次
while (ros::ok()) {
// 创建一个消息并设置随机数
std_msgs::Int32 msg;
msg.data = std::rand() % 100; // 生成 0 到 99 的随机数
// 发布消息
random_pub.publish(msg);
ROS_INFO("Published random number: %d", msg.data);
// 休眠直到下一个循环
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}修改
CMakeLists.txt添加如下内容:
1
2add_executable(random_number_publisher src/random_number_publisher.cpp)
target_link_libraries(random_number_publisher ${catkin_LIBRARIES})编译包
回到工作空间,输入
catkin_make编译包
5.2.2.2 py版本的实现
在
pub_sub_pkg/src目录下创建一个名为random_number_publisher.py的文件,并添加如下内容1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26import rospy
from std_msgs.msg import Int32
import random
def random_number_publisher():
# 初始化节点
rospy.init_node('random_number_publisher', anonymous=True)
# 创建一个发布者,发布到 "random_number" 主题
pub = rospy.Publisher('random_number', Int32, queue_size=10)
# 设置循环频率
rate = rospy.Rate(1) # 每秒发布一次
while not rospy.is_shutdown():
# 生成随机数
random_number = random.randint(0, 99) # 生成 0 到 99 的随机数
rospy.loginfo("Published random number: %d", random_number)
# 创建消息并发布
pub.publish(random_number)
# 休眠直到下一个循环
rate.sleep()
if __name__ == '__main__':
try:
random_number_publisher()
except rospy.ROSInterruptException:
pass修改
CMakeLists.txt添加如下内容:
1
2
3
4catkin_install_python(PROGRAMS
src/random_number_publisher.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)编译包
回到工作空间,输入
catkin_make编译包
5.2.3 Subscriber的编写
5.2.3.1 cpp版本的实现
在
pub_sub_pkg/src目录下创建一个名为random_number_subscriber.cpp的文件,并添加如下内容:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
void randomNumberCallback(const std_msgs::Int32::ConstPtr& msg) {
ROS_INFO("Received random number: %d", msg->data);
}
int main(int argc, char** argv) {
ros::init(argc, argv, "random_number_subscriber");
ros::NodeHandle nh;
// 创建一个订阅者,订阅 "random_number" 主题
ros::Subscriber sub = nh.subscribe("random_number", 10, randomNumberCallback);
// 循环等待回调
ros::spin();
return 0;
}修改
CMakeLists.txt添加如下内容:
1
2add_executable(random_number_subscriber src/random_number_subscriber.cpp)
target_link_libraries(random_number_subscriber ${catkin_LIBRARIES})编译包
回到工作空间,输入
catkin_make编译包
5.2.3.2 py版本的实现
在
pub_sub_pkg/src目录下创建一个名为random_number_subscriber.py的文件,并添加如下内容:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17import rospy
from std_msgs.msg import Int32
def random_number_callback(msg):
rospy.loginfo("Received random number: %d", msg.data)
def random_number_subscriber():
# 初始化节点
rospy.init_node('random_number_subscriber', anonymous=True)
# 创建一个订阅者,订阅 "random_number" 主题
rospy.Subscriber('random_number', Int32, random_number_callback)
# 循环等待回调
rospy.spin()
if __name__ == '__main__':
random_number_subscriber()修改
CMakeLists.txt添加如下内容:
1
2
3
4catkin_install_python(PROGRAMS
src/random_number_subscriber.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)编译包
回到工作空间,输入
catkin_make编译包
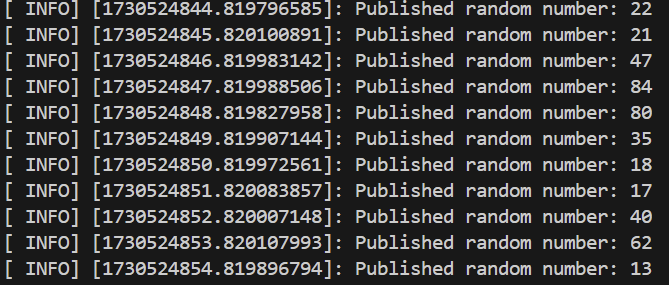
5.2.4 运行节点
启动 ROS 核心:
1
roscore
启动发布节点:
若运行cpp版本使用命令
1
rosrun pub_sub_pkg random_number_publisher
若运行py版本使用命令
1
rosrun pub_sub_pkg random_number_publisher.py
启动订阅节点:
若运行cpp版本使用命令
1
rosrun pub_sub_pkg random_number_subscriber
若运行py版本使用命令
1
rosrun pub_sub_pkg random_number_subscriber.py
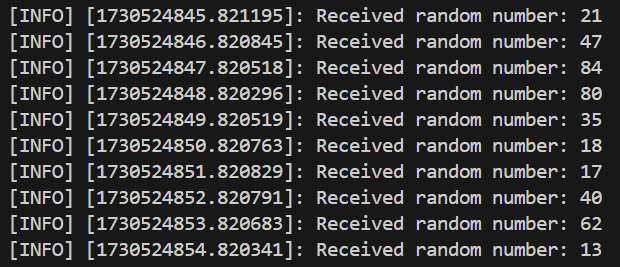
运行效果如图:
5.3 自定义消息类型
面向更加复杂的应用,我们需要创建自定义消息类型来满足开发需求。我们创建一个功能包名为custom_message,并在该功能包中进行以下操作。
5.3.1 创建自定义消息类型
假设我们创建一个包含一个整数和一个字符串的消息类型。
创建消息文件
在
custom_message目录下创建msg文件夹,并在该文件夹中创建一个RandomNumber.msg文件,添加如下内容1
2int32 number
string message修改
package.xml在
package.xml文件中添加以下内容1
2<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>修改
CMakeLists.txt可对照下面内容进行修改
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
add_message_files(
FILES
RandomNumber.msg
)
generate_messages(
DEPENDENCIES
std_msgs
)可以先用
catkin_make编译一次,方便之后的源文件调用
然后在之前的Publisher和Subscriber的基础上修改代码
5.3.2 修改发布节点
random_msg_publisher.cpp的内容如下:
1 |
|
random_msg_publisher.py的内容如下:
1 | import rospy |
CMakeLists.txt添加
1 | add_executable(random_msg_publisher src/random_msg_publisher.cpp) |
5.3.3 修改订阅节点
random_msg_subscriber.cpp内容如下:
1 |
|
random_msg_subscriber.py内容如下:
1 | import rospy |
CMakeLists.txt添加:
1 | add_executable(random_msg_subscriber src/random_msg_subscriber.cpp) |
5.3.4 运行节点
启动 ROS 核心:
1
roscore
启动发布节点:
若运行cpp版本使用命令
1
rosrun custom_message random_msg_publisher
若运行py版本使用命令
1
rosrun custom_message random_msg_publisher.py
启动订阅节点:
若运行cpp版本使用命令
1
rosrun custom_message random_msg_subscriber
若运行py版本使用命令
1
rosrun custom_message random_msg_subscriber.py
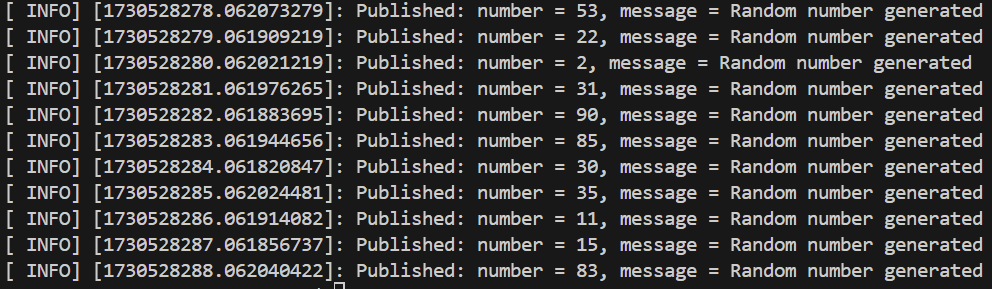
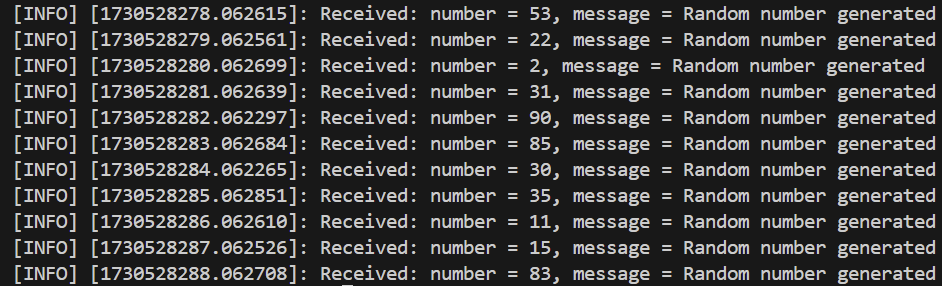
运行效果如图:
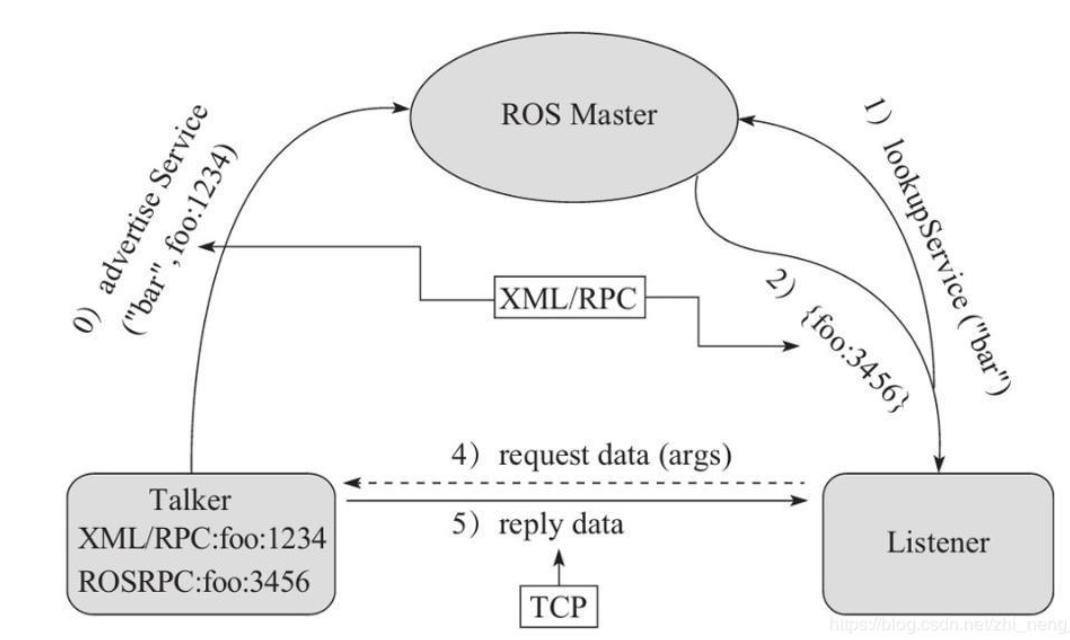
5.4 服务通信
服务通信模型中涉及到三个角色:
- ROS master(管理者)
- Server(服务端)
- Client(客户端)
ROS Master 负责保管 Server 和 Client 注册的信息,并匹配话题相同的 Server 与 Client ,帮助 Server 与 Client 建立连接,连接建立后,Client 发送请求信息,Server 返回响应信息。理论模型如下图:
这里实现一个简单的服务通信,客户端发出两个数字请求,服务端返回它们的和。
5.4.1 创建功能包
我们创建一个名为 add_service 的包,在src文件夹下执行命令:
1 | catkin_create_pkg add_service std_msgs rospy roscpp message_generation |
5.4.2 创建自定义服务消息
在功能包中新建
srv文件夹,在里面添加AddTwoInts.srv文件,内容如下:1
2
3
4int64 a
int64 b
---
int64 sum---上方的是请求数据类型,下方的是响应数据类型。这里定义了一个请求包含两个整数a和b,响应包含它们的和sum。确保
CMakeLists.txt被修改成如下:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15find_package(catkin REQUIRED COMPONENTS
rospy
std_msgs
message_generation
)
add_service_files(
FILES
AddTwoInts.srv
)
generate_messages(
DEPENDENCIES
std_msgs
)确保
package.xml有如下依赖:1
2<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>编译包
5.4.3 创建服务端
5.4.3.1 cpp版本的实现
在
add_service/src目录下创建一个名为add_service_server.cpp的文件,并添加以下代码:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
// 处理加法请求的回调函数
bool handle_add_two_ints(add_service::AddTwoInts::Request &req,
add_service::AddTwoInts::Response &res) {
// 计算请求的两个整数之和
res.sum = req.a + req.b;
ROS_INFO("Request: a=%ld, b=%ld; Sending back response: sum=%ld", req.a, req.b, res.sum);
return true; // 返回成功
}
int main(int argc, char **argv) {
ros::init(argc, argv, "add_service_server"); // 初始化节点
ros::NodeHandle n; // 创建节点句柄
// 创建服务,注册到名为 "add_two_ints" 的服务上
ros::ServiceServer service = n.advertiseService("add_two_ints", handle_add_two_ints);
ROS_INFO("Ready to add two ints."); // 打印日志信息
ros::spin(); // 进入循环,等待服务请求
return 0; // 返回成功
}修改
CMakeLists.txt,添加如下内容:1
2add_executable(add_service_server src/add_service_server.cpp)
target_link_libraries(add_service_server ${catkin_LIBRARIES})编译
5.4.3.2 py 版本的实现
在
add_service/src目录下创建一个名为add_service_server.py的文件,并添加以下代码:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18import rospy
from add_service.srv import AddTwoInts, AddTwoIntsResponse # 引入自定义服务消息
# 处理加法请求的回调函数
def handle_add_two_ints(req):
result = req.a + req.b # 计算请求的两个整数之和
rospy.loginfo("Request: a={}, b={}; Sending back response: sum={}".format(req.a, req.b, result))
return AddTwoIntsResponse(result) # 返回结果
# 服务端初始化
def add_service_server():
rospy.init_node('add_service_server') # 初始化节点
s = rospy.Service('add_two_ints', AddTwoInts, handle_add_two_ints) # 注册服务
rospy.loginfo("Ready to add two ints.") # 打印日志信息
rospy.spin() # 进入循环,等待服务请求
if __name__ == "__main__":
add_service_server() # 启动服务端修改
CMakeLists.txt,添加如下内容:1
2
3
4catkin_install_python(PROGRAMS
src/add_service_server.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)编译
5.4.4 创建客户端
5.4.4.1 cpp版本的实现
在
add_service/src目录下创建一个名为add_service_client.cpp的文件,并添加以下代码:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
int main(int argc, char **argv) {
// 检查命令行参数数量
if (argc != 3) {
ROS_INFO("Usage: add_service_client <num1> <num2>");
return 1; // 返回错误
}
ros::init(argc, argv, "add_service_client"); // 初始化节点
ros::NodeHandle n; // 创建节点句柄
// 创建服务客户端,连接到 "add_two_ints" 服务
ros::ServiceClient client = n.serviceClient<add_service::AddTwoInts>("add_two_ints");
add_service::AddTwoInts srv; // 创建服务请求对象
srv.request.a = atoll(argv[1]); // 将第一个参数转为整数并赋值
srv.request.b = atoll(argv[2]); // 将第二个参数转为整数并赋值
// 调用服务并检查是否成功
if (client.call(srv)) {
ROS_INFO("Sum: %ld", srv.response.sum); // 打印返回的和
} else {
ROS_ERROR("Failed to call service add_two_ints"); // 打印错误信息
return 1; // 返回错误
}
return 0; // 返回成功
}修改
CMakeLists.txt,添加如下内容:1
2add_executable(add_service_client src/add_service_client.cpp)
target_link_libraries(add_service_client ${catkin_LIBRARIES})编译
5.4.4.2 py版本的实现
在
add_service/src目录下创建一个名为add_service_client.py的文件,并添加以下代码:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27import sys
import rospy
from add_service.srv import AddTwoInts # 引入自定义服务消息
# 客户端请求加法服务
def add_two_ints_client(x, y):
rospy.wait_for_service('add_two_ints') # 等待服务可用
try:
add_two_ints = rospy.ServiceProxy('add_two_ints', AddTwoInts) # 创建服务代理
resp = add_two_ints(x, y) # 调用服务
return resp.sum # 返回结果
except rospy.ServiceException as e:
print("Service call failed: {}".format(e)) # 打印错误信息
if __name__ == "__main__":
# 检查命令行参数数量
if len(sys.argv) != 3:
print("Usage: add_service_client.py [num1] [num2]")
sys.exit(1) # 返回错误
num1 = int(sys.argv[1]) # 将第一个参数转为整数
num2 = int(sys.argv[2]) # 将第二个参数转为整数
rospy.init_node('add_service_client') # 初始化节点
print("Requesting {} + {}".format(num1, num2)) # 打印请求信息
sum = add_two_ints_client(num1, num2) # 请求服务
print("Sum: {}".format(sum)) # 打印结果修改
CMakeLists.txt,添加如下内容:1
2
3
4catkin_install_python(PROGRAMS
src/add_service_client.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)编译
5.4.5 运行节点
启动 ROS 核心:
1
roscore
启动服务端节点:
若运行cpp版本使用命令
1
rosrun add_service add_service_server
若运行py版本使用命令
1
rosrun add_service add_service_server.py
启动客户端节点:
若运行cpp版本使用命令
1
rosrun add_service add_service_client num1 num2
若运行py版本使用命令
1
rosrun add_service add_service_client.py num1 num2
运行效果如图:


5.5 参数操作
5.5.1 创建功能包
在src文件夹中执行如下命令:
1 | catkin_create_pkg param_example std_msgs rospy roscpp |
5.5.2 cpp实现
在
param_example/src目录下创建一个名为param_example_node.cpp的文件,并添加以下代码:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
int main(int argc, char **argv) {
ros::init(argc, argv, "param_example_node"); // 初始化节点
ros::NodeHandle n; // 创建节点句柄
// 设置参数
n.setParam("example_param", 10); // 设置名为 "example_param" 的参数
// 获取参数
int param_value;
if (n.getParam("example_param", param_value)) { // 获取参数值
ROS_INFO("Got parameter: example_param=%d", param_value); // 打印参数值
} else {
ROS_WARN("Could not get parameter: example_param"); // 打印警告
}
// 修改参数
n.setParam("example_param", 20); // 修改参数值
// 重新获取参数
if (n.getParam("example_param", param_value)) {
ROS_INFO("Updated parameter: example_param=%d", param_value); // 打印更新后的参数值
}
ros::spinOnce(); // 处理回调
return 0; // 返回成功
}在
CMakeLists.txt文件中添加 C++ 可执行文件的配置:1
2add_executable(param_example_node src/param_example_node.cpp)
target_link_libraries(param_example_node ${catkin_LIBRARIES})编译
5.5.3 py实现
在
param_example/src目录下创建一个名为param_example_node.py的文件,并添加以下代码:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23import rospy
if __name__ == "__main__":
rospy.init_node('param_example_node') # 初始化节点
# 设置参数
rospy.set_param('example_param', 10) # 设置名为 "example_param" 的参数
# 获取参数
param_value = rospy.get_param('example_param', None) # 获取参数值
if param_value is not None:
rospy.loginfo("Got parameter: example_param={}".format(param_value)) # 打印参数值
else:
rospy.logwarn("Could not get parameter: example_param") # 打印警告
# 修改参数
rospy.set_param('example_param', 20) # 修改参数值
# 重新获取参数
param_value = rospy.get_param('example_param')
rospy.loginfo("Updated parameter: example_param={}".format(param_value)) # 打印更新后的参数值
rospy.spin() # 进入循环在
CMakeLists.txt文件中如下配置:1
2
3
4catkin_install_python(PROGRAMS
src/param_example_node.py
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)编译
5.5.4 运行节点
启动 ROS 核心:
1 | roscore |
运行节点:
cpp版本
1
rosrun param_example param_example_node
py版本
1
rosrun param_example param_example_node.py
运行结果:

6. launch文件的使用
launch 文件是一种 XML 格式的文件,用于定义和管理节点的启动过程。通过 launch 文件,可以一次性启动多个节点,设置参数,定义节点间的连接(如话题、服务等),并配置其他相关选项。这使得管理复杂的机器人系统变得更加简单和高效。
6.1 新建launch文件
在功能包下新建 launch 目录, 目录下新建 xxxx.launch 文件。一个简单示例如下
1 | <launch> |
6.2 launch文件的标签和属性
在 ROS 的 launch 文件中,有多种属性和标签可用于配置节点的启动、参数设置、依赖管理等,常见的属性和标签如下:
<launch>根元素:每个
launch文件都以<launch>标签开始,表示该文件的开始。<node>pkg:节点所属的 ROS 包名称。type:节点的可执行文件名。name:节点的名称(可以与可执行文件名相同,但推荐使用不同的名称以便于识别)。output:节点的输出方式,可以是screen(在终端显示)或log(输出到日志文件)。args:传递给节点的命令行参数。respawn:如果节点崩溃是否自动重启,取值为true或false。respawn_delay:当respawn为true时,重启节点的延迟时间(单位为秒)。required:如果节点是必需的,设置为true,否则设置为false。
示例:
1
<node pkg="my_package" type="my_node" name="my_node_name" output="screen" respawn="true" respawn_delay="2"/>
子级标签有:
env环境变量设置remap重映射节点名称rosparam参数设置param参数设置
<param>设置参数,主要属性如下:
name:参数名称。value:参数的值,可以是常量、字符串、布尔值等。type:参数类型,支持int,double,string,bool等。
示例:
1
<param name="param_name" value="param_value"/>
<rosparam>用于加载参数文件,支持 YAML 格式。
file:指定要加载的 YAML 文件的路径。command:可以是load或dump,分别用于加载和导出参数。
示例:
1
<rosparam file="$(find my_package)/config/params.yaml" command="load"/>
<include>用于从其他
launch文件中引用节点。file:要包含的launch文件的路径,可以使用$(find package_name)来引用包内的文件。
示例:
1
<include file="$(find another_package)/launch/another_launch_file.launch"/>
<group>将多个节点或参数分组,可以设置特定的属性。
name:分组名称,通常用于命名空间。ns:定义命名空间。
示例:
1
2
3<group ns="my_namespace">
<node pkg="my_package" type="my_node" name="my_node_name"/>
</group><test>用于运行测试节点,主要属性如下:
pkg:测试节点所属的 ROS 包名称。type:测试节点的可执行文件名。name:测试节点的名称。
示例:
1
<test pkg="my_package" type="test_node" name="test_node_name"/>
<arg>定义命令行参数,主要属性如下:
name:参数名称。default:默认值。
示例:
1
<arg name="my_arg" default="default_value"/>
使用
$(arg my_arg)可以引用该参数。<remap>用于重映射话题名称。
from:原始话题名称。to:新话题名称。
1
<remap from="/old_topic" to="/new_topic"/>
6.3 调用launch文件
使用命令
1 | roslaunch 包名 xxx.launch |
roslaunch 命令执行launch文件时,首先会判断是否启动了 roscore,如果启动了,则不再启动,否则,会自动调用 roscore。
7. 常用的ROS命令
7.1 ROS信息命令
7.1.1 rosnode
节点相关命令
1 | rosnode ping 测试到节点的连接状态 |
7.1.2 rostopic
话题相关命令
1 | rostopic bw 显示主题使用的带宽 |
7.1.3 rosmsg
消息相关命令
1 | rosmsg show 显示消息描述 |
7.1.4 rosservice
服务相关命令
1 | rosservice args 打印服务参数 |
7.1.5 rossrv
服务信息相关命令
1 | rossrv show 显示服务消息详情 |
7.1.6 rosparam
参数相关命令
1 | rosparam set 设置参数 |
7.1.7 rosbag
记录和重放相关命令
1 | check 确定 bag 在当前系统中是否可播放,或者是否可以迁移 |
7.1.8 rosversion
显示ROS功能包的版本信息
1 | -h, --help 显示此帮助消息并退出 |
7.2 ROS shell 命令
ROS shell命令又被称为rosbash。相关命令如下:
| 命令 | 命令释义 | 详细说明 | 参考模板 |
|---|---|---|---|
| roscd | ros+cd(changes directory) | 移动到指定的ROS功能包目录 | roscd [功能包名称] |
| rosls | ros+ls(lists files) | 显示ROS功能包的文件和目录 | rosls [功能包名称] |
| rosed | ros+ed(editor) | 编辑ROS功能包的文件 | rosed [功能包名称] [文件名称] |
| roscp | ros+cp(copies files) | 复制ROS功能包的文件 | — |
| rospd | ros+pushd | 添加目录至ROS目录索引 | — |
| rosd | ros+directory | 显示ROS目录索引中的目录 | — |
7.3 ROS 执行命令
ROS 执行命令管理ROS节点的运行。
| 命令 | 命令释义 | 详细说明 | 参考模板 |
|---|---|---|---|
| roscore | ros+core | master(ROS名称服务) + rosout(日志记录) + parameter server(参数管理) | roscore [选项] |
| rosrun | ros+run | 运行单个节点 | rosrun [功能包名称] [节点名称] |
| roslaunch | ros+launch | 运行多个节点或设置运行选项 | roslaunch [功能包名称] [launch文件名] |
| rosclean | ros+clean | 检查或删除ROS日志文件 | rosclean [选项] |
7.4 ROS catkin命令
ROS catkin命令ROS的catkin命令用于使用catkin 构建系统来构建功能包。
| 命令 | 详细说明 | 参考模板 |
|---|---|---|
| catkin_create_pkg | 自动生成功能包 | catkin_create_pkg [功能包名称] [依赖性功能包1] [依赖性功能包2] … |
| catkin_make | 基于catkin 构建系统的构建 | catkin_make –[选项] |
| catkin_eclipse | 把用catkin 构建系统生成的功能包修改,使得可以在Eclipse 环境中使用 | catkin_eclipse |
| catkin_prepare_release | 发布时用到的日志整理和版本标记 | catkin_prepare_release |
| catkin_generate_changelog | 发布时生成或更新CHANGELOG.rst文件 | catkin_generate_changelog |
| catkin_init_workspace | 初始化catkin 构建系统的工作目录 | catkin_init_workspace |
| catkin_find | 搜索catkin | catkin_find [功能包名称] |
7.5 ROS功能包命令
ROS 功能包命令用于操作ROS功能包,比如显示功能包信息、安装相关功能包等。
| 命令 | 命令释义 | 详细说明 | 参考模板 |
|---|---|---|---|
| rospack | ros+pack(age) | 显示与ROS功能包相关的信息 | rospack [选项] [功能包名称] |
| rosinstall | ros+install | 安装ROS附加功能包 | —— |
| rosdep | ros+dep(endencies) | 安装该功能包的依赖性文件 | rosdep [选项] |
| roslocate | ros+locate | 与ROS功能包信息有关的命令 | roslocate [选项] [功能包名称] |
| roscreate-pkg | ros+create-pkg | 自动生成ROS功能包 | (用于旧的rosbuild系统) |
| rosmake | ros+make | 构建ROS功能包(用于旧的rosbuild系统) | —— |